



Kajalood või miski sügavust näitav seade on täna küll olemas vist juba 99%-l aktiivses kasutuses olevatest mootorpaatidest. Iga paadiomanik saab ju aru, et nii reisijate kui paadi tervise huvides on oluline teada, kui palju Su paadil vett kiilu all on.
Samas suudavad tänapäevased kajaloodid märksa enamat, kui ainult sügavust näidata. Müües igal aastal tublisti üle 100 kajaloodi võime öelda, et kõige sagedasem küsimus kajaloodiostjalt on: „Kas see kajalood sügavust ja kalu ka näitab?“. Mõni küsija lisab sellesse loetelusse veel ka veetemperatuuri.
Ja alati on hea neile vastata, et praktiliselt kõik turul müüdavad uued kajaloodid suudavad näidata nii sügavust, kalu kui veetemperatuuri.
Ja tavaliselt ongi järgmine küsimus siis juba selle kohta, miks mõni kajalood maksab 150.- EUR ja mõni teine 5000.- EUR, kui kõik näitavad ühtmoodi sügavust, kalu ja veetemperatuuri… Eks püüame siis selgitada, mille poolest kajaloodid erinevad, ja mida nende ekraanidel kuvatavast pildist siis välja lugeda võib.
Iga toimiv kajalood koosneb reeglina 3-st peamisest osast:
1) Andur, mis saadab ja võtab vastu peegeldunud kõrgsageduslikke helilaineid
2) Ekraaniga protsessor, mis analüüsib laekuvaid signaale ja kuvab tulemust kasutajale
3) Toiteallikas/aku, mis mõlemale eelnimetatud komponendile tegevuseks energiat annab
Klassikalistel paadikajaloodidel (Lowrance, Humminbird, Garmin jt) on kõik need komponendid selgelt eristatavad ja omavahel juhtmetega ühendatud. Samas on portatiivsetel nn. taskukajaloodidel (Deeperi erinevad mudelid, Lowrance FishHunter) andur ja toiteaku pakitud ühte veekindlasse korpusesse ja ekraanina kasutatakse hoopis kasutaja nutitelefoni, mis anduriga distantsilt WiFi abi suhtleb ja kalastajale pilti kuvab. Tegelikult polegi tänapäevane kajalood pole midagi muud, kui lihtsalt veidi eripäraste lisaseadmetega suurem või väiksem arvuti.
Ekraanimoodul on kajaloodi aju
Kuna tootjate omavahelises võidujooksus muutuvad andurid järjest võimsamaks ja nende edastatav infovoog keerulisemaks ja suuremahulisemaks, siis seab see ka kajaloodi põhimoodulile järjest kõrgemaid nõudmisi – protsessorid peavad uutes toodetes muutuma järjest kiiremateks, et infotöötlusega edukalt toime tulla. Seetõttu ei saagi vanemate kajaloodiekraanidega kasutada uuemaid andureid. Vastupidi on see reeglina võimalik (kui pistikud sobivad), aga osa kajaloodi võimekusest jääb siis kasutamata.
Lisaks on parematel kajaloodiseeriatel olemas sisse-ehitatud GPS koos sügavuskaartide kasutamise võimalusega. Veel mõni aeg tagasi olid selleks eraldi seadmed, mida nimetati plotteriteks.
Kaardid ei ole enamasti salvestatud kajaloodi mällu, vaid välisele microSD kiibile, mida kajaloodi kaardipesas vajadusel vahetada saab. Kiibil asuvate kaartidega võib vanematel kajaloodidel tekkida sama probleem, mis uumate anduritega – nende protsessorid ei saa hakkama suuremate kiipide lugemise ja uute suuremamahuliste 8Gb või 32Gb kaartidega ega suuda neid seetõttu avada.
Loomulikult sisaldavad kaasaegsed kajaloodid ka suurel hulgal tarkvara, mis muudab nad päris korralikeks arvutiteks, võimaldab vahetada infot ja keskseadmena juhtida andmevõrgus asuvaid elektrimootoreid, autopiloote, radareid, ilmajaamu, raadioid jne. Aga mitte sellest ei tahtnud me täna rääkida.
Andurid on kajaloodi silmadeks
Kajaloodi andurid määravad selle, mida me vee all toimuvast näha saame. On selge, et kajaloodi soetades tahaks kasutaja, et see näitaks ümberringi kõigis suundades ja suudaks igalt pool ka kalu üles leida. Sageli küsitakse, kas üks või teine kajalood suudab ettepoole näidata, et näiteks veealuste kivide eest hoiatada. Selline „ettevaatav“ tehnoloogia on päris kallis, ja standardsete kajaloodide komplektis seda pole. Mõnedel tootjatel (nt Humminbirdil) on olemas 360 kraadi radar, aga seegi on mõeldud pigem kalaparvede otsimiseks sügavamas vees.
Kasutaja peaks teadma, kas tema kajaloodi külge ühendatud andur on 2D tüüpi (ehk skaneeritav ala on koonusekujuline), mis on mõeldud eelkõige seisvast paadist või jäält kasutamiseks, või skaneerib andur pidevalt õhukest, paadi liikumissuunaga risti asetsevat tasapinda paadi all/külgedel ja on mõeldud kasutamiseks just liikuvas paadis. Lähtudes ühest või teisest variandist on ekraanipildi tõlgendamine veidi erinev.

Pilt 1. 2D anduri skaneerimisala on koonusekujuline ja selle laius sõltub kasutatavast sagedusest.

Pilt 2. Struktuuranduri skaneerimisala on õhuke ja ulatub kaugele külgedele, kuvades igal hetkel vaid väga lühikest osa paadi all olevast alast.
Kõige lihtsamad ja traditsioonilisemad andurid kasutavad 83/200 kHz sagedusi, vaatavad ainult paadi alla, kattes veekogu põhjas ala, mis olenevalt sagedusest on võrdne ligikaudu 1/3 sügavusest (ehk siis 6m sügavuses vees ca 2m, 9m vees 3m) ja edastavad klassikalist „sonaripilti“. Edasiarendus sellest on CHIRP-andurid, mille kasutatavate sageduste hulk on suurem ja mis oskavad signaale ka moduleerida/varieerida, saavutamaks kvaliteetsemat pilti – nii suudavad nad palju paremini üksteisest eristada mitut lähestikku asetsevat objekti, näiteks parves asuvaid üksikuid kalu. Alates käesolevast aastast on CHIRP andurid ka juba portatiivsete heidetavate kajaloodide relvastuses – Deeper tuli just hiljuti vastava tootega turule. „Sonaripilti“ edastavad andurid tuvastavad kalu üldjuhul ujupõite järgi.

Pilt 3. Sonaripilt Soome merevetest. Paremal näha sügava vee keskel asuva veealuse kalju piirjooni. Vasakul eri suurustes üksikud kalakaared ja paar väiksemat kalaparve (punased kogumid) pooles vees. Samuti on kalu näha kaljutippude kohal. Sinine säbru 2-4 m sügavusel on peamiselt väikesed kalad. Foto: Koit Kikas, Kalaretk.ee
Järgmine ja uuem tüüp andureid (Lowrancel Tripleshot, Totalscan, Active Imaging, Humminbirdil Mega Side Imaging) suudab edukalt vaadata ka külgsuunas ja kasutab selleks Lowrancel 455/800 kHz ja Humminbirdil üle 1 MHz sagedusi. Samas ei joonista see ekraanile klassikalist mitmevärvilist veekihi pilti, vaid laotab kolmemõõtmelise veekeskkonna teie ette pealtvaates ja kahemõõtmelisena, kuvades seda sarnaselt mustvalge fotoga või selle negatiiviga. Selliste sagedustega andurid skaneerivad suurepäraselt just pindasid ja suudavad seetõttu näidata põhja ja veealuseid objekte üsna reaalsete ja arusaadavate kontuuridega.

Pilt 4. Struktuurskänni pilt Emajõelt. 800kHz ja Lowrance Active Imaging 3-1 andur. Keskel asuv ülalt alla ulatuv hele triip on anduri (paadi) asukoht. Tume osa kummalgi pool triipu on paadi all asuv veekiht andurist kuni põhjani. Vee sügavus on hetkel veidi alla 5 meetri (skaala on allservas nähtav), ja põhi on kummalgi pool näha veel pisut enam kui 7 m ulatuses (vaatekaugus „Range“ on 12m kummaski suunas). Paadist paremal pool on uppunud põõsas või puulatv, mille ülemised oksad ulatuvad pea poolde vette, ja mille külge lant või rakendus kindlasti suurepäraselt kinni jääks. Foto: Jaak Väärsi, fishfinder.ee
Kui sellise tehnoloogiaga saadud pilt pöörata analoogselt harjumuspärase „sonaripildiga“ külgvaatesse, siis nimetatakse seda DownScan´iks. Vaatenurk on sellel küll sama, kuid vaadeldava ala laius võib olla märksa suurem. Lowrance on lisanud DownScan vaatele ka kalade leidmist hõlbustava FishReveal tarkvara, mis värvib kalad sellel monokroomsel DownScani vaatel teist värvi, näiteks roheliseks. Lowrance Hook2 seeria Splitshot andur võimaldab küll näha DownScani vaadet, kuid erinevalt Tripleshotist külgedele see ei vaata. Sama võib öelda Humminbirdi DI (Down Imaging) seadmete kohta, kui neid Humminbird SI (Side Imaging) seadmetega võrrelda.

Pilt 5. Downscani pilt koos FishReveali funktsiooni kasutamisega (kalu kuvatakse selles värvipaletis erkkollastena). Keskel pooles vees on näha pisikalade parv, mille ümber mõned suuremad „karjased“. Samuti on põhjas parve all näha paari suuremat röövkala, kes toidulaual silma peal hoiavad. Foto: Jaak Väärsi, fishfinder.ee
Külgedele vaatamise juures tekib kasutajal sageli küsimus, kui kaugele külgedele sellise anduriga vaadata saab. Tegelikult sõltub see päris suurel määral nii anduri kvaliteedist kui ekraani suurusest – 12“ ekraaniga kajaloodil on objektid nähtavad palju suurematena kui 7“ ekraanidel. Aga ka 7“ ekraaniga on objektid 20-25m kummaski suunas üsna edukalt vaadeldavad.
Struktuursetest anduritest tahaks veel eraldi välja tuua Lowrance uue Active Imaging 3-1 anduri (Elite Ti2 ja HDS Live seeria standardvarustuses) , mille 800 kHz sagedus teeb vaatekauguse ja tundlikkuse mõttes „tuule alla“ ka Humminbirdi 1+ MHz anduritele, mis Lowrance eelmise põlvkonna Totalscanidest ehk veidi paremad olid.
Üksikuid kalu on kahemõõtmeliseks surutud struktuuranduri pildilt keerulisem leida kui klassikaliselt sonarivaatelt, sest need sulavad monokroomse fooniga kokku. Osava silmaga ja hea seadistusega on suuremad kalad nähtavad. Samas on nii suuremate kui väiksemate kalade parved väga hästi leitavad. Ja loomulikult on see lausa asendamatu, kui soovite leida kiviseid kohti või tahate vältida lantide kinnijäämist veealuste puutüvede, mõrraköite, uppunud paatide või mingite muude objektide külge.
Veel uuemad andurid – Lowrance HDS Live LiveSight ja Garmini Panoptix Livescope – suudavad juba näidata kajaloodiekraanil reaalajas liikuvat pilti, millelt võib leida nii enda landi kui sellest huvituva kalaparve, aga nende kasutuskogemus on veel väga väike, ja tundlikkus ning tegevusraadius lähiaastatel kindlasti hoogsas arengus.
Aga enne kui läheme kalade tuvastamise ja nende suuruste eristamise juurde, meenutame lihtsat põhitõde, mida kajaloodi kasutaja peab meeles pidama:
Kajaloodipilt liigub ekraanil alati olevikust minevikku.
Sõltumata kajaloodianduri tüübist on kasutajal oluline mitte unustada, et jooksva sonaripildi paremas servas on käesolev hetk, ja vasakule poole liikudes järjest kaugem minevik. Struktuuripildil on olevik vastavalt üleval, ja minevik järjest kaugemal all. Kui liigute paadiga mõõduka kiirusega (näiteks ca 1 m sekundis), siis võib see liikuv minevik olla suhteliselt heas vastavuses sellele, kes või mis paadi all teie sõidujoonele jäi. Aga kajaloodi sonaripilt kerib samas tempos paremalt vasakule (ja ülalt alla) ka siis, kui paat liigub 3 korda kiiremini, seisab või hoopis tagurpidi sõidab. Seega ei tähenda kalakujutis ekraanil sugugi alati seda, et 10 või 20m teie paadi taga oli kala, vaid seda tuleb alati vaadata korrelatsioonis reaalse liikumiskiiruse ja -suunaga. Muidu teate vaid seda, et miski kala oli teie sonari vaateväljas 10 või 20 sekundit tagasi. Kala asukohta ainult sonaripildi järgi määrata ei saa. Nagu ka seda, kas ta liikus paremalt vasakule või vastupidi.
Uuemad struktuurset pilti edastavad ja külgedele vaatavad andurid võimaldavad määrata objektide asukohta täpsemalt, kuna nad näitavad teile põhja paadi all ja külgedel. Seega teate, kummal pool ja kui kaugel paadist vastav objekt asub. Aga siingi tuleb meeles pidada, et kajalood ei edasta kaamerapilti, vaid skaneerib õhukest tasapinda ja edastab pilti, kus käesolev hetk on ekraani ülaservas ja allapoole liigub järjest kaugem minevik. Struktuurse anduri kasutamisel on paadi seisma jätmisel kohe näha, et andur ei näita enam fotosarnast muutuvat põhjastruktuuri, vaid veab hulka paralleelseid triipe, sest skännib ju täpselt üht ja sama kohta.
Kalade otsimise puhul on kõige olulisem reegel:
Ära kasuta kalade otsimisel kalaikoone
Kalade leidmiseks ja nende käitumise jälgimiseks ei kasuta kogenud kalastajad kalaikoone (kui kajaloodil on vähegi võimalus neid välja lülitada). Sest ikoonid varjavad tegelikku pilti. Oluliselt täpsema ülevaate saab kalade olemasolust, suurusest ja liikumisest, kui õppida sonarivaates kalu leidma „kalakaarte“ abil. „Kalakaar“ on tinglik nimetus, sest see kaar tekib vaid siis, kui paat ja kala üksteise suhtes liiguvad (kala ujub anduri alt läbi, või paat/andur liigub üle seisva kala). Kui kajaloodi andur on paigal ja kala seisab anduri all (jääpüügil või seisvas paadis), siis ei teki kalakaart, vaid pikk ja pidev joon kuni kala anduri all asub. Kui anduri all asuv kala veekihis tõuseb, siis näeme vasakult paremale tõusvat joont, kui kala veekihis laskub, siis vasakult paremale laskuvat joont. Paadi all väikest kala aktiivselt jahtiv ahvenaparv jätab ekraanile korraliku joonte segadiku, kus on läbisegi nii tõusvaid kui langevaid jooni.

Pilt 6. Aktiivselt toituv ahvenaparv paadi all sonarivaates. Tõusvad ja laskuvad kalad jätavad ekraanile tõelise joonte virvarri, mida muude kalaparvede puhul eriti ei kohta. Foto: Jaana Jekkonen, Fishmeluck.fi
Väikeste kalade tihedad parved on ekraanil tavaliselt nähtavad hajusamate või tihedamate pilvekestena, kus eraldi kalakaari pole võimalik vaadelda. Sõltuvalt kalade paiknemise tihedusest on parve ääred hõredamad ja keskosa märksa tugevamalt/eredamalt värvunud. Suurte ja tihedate kalaparvede puhul võib paadi all olla ka mitmemeetrine tugevalt värvunud kiht. Kui nende pilvekeste või kihtide läheduses (tavaliselt allpool) on näha selgelt eristuvaid kalakaari, siis on reeglina tegemist parve liikumisel silma peal hoidvate röövkaladega.

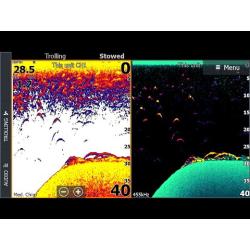
Pilt 7. Parempolsel sonarivaatel on näha hulgaliselt pisikalu ja kaks tihedamat pisikalade parve, mille keskosa on kalakeste suurema tiheduse tõttu ümaralt punaseks värvunud. Nende vahel veidi allpool on kaks selgelt eristuvat kalakaart (suuruse järgi otsustades ahvenad), kes söödakalal silma peal hoiavad. Vasakpoolses kaardivaates on näha Lowrance LiveSight kaardistusrakenduse töö. Selle veeala kohta (Soomes) polnud olemas ühtki kaarti, ja kaardistusvõimalus aitas edukalt leida ja kaardistada muidu 9-10m vees madalamaid 4-5m kohti, kus ahvenaparved saaki varitsesid. Foto: Koit Kikas, kalaretk.ee
Tasub veel mainida, et kajaloodiga põhjalikumaks tutvumiseks tuleks valida selline koht, kus vee sügavus on suurem kui 4m. Madalamas vees kardavad suuremad ja ettevaatlikumad kalad paati, ja te ei pruugi neid klassikalises sonarivaates seetõttu üldse leida. Erandiks on aktiivselt jahiretkel olev ahven, kes jälitab sageli lanti paadini ja jääb ka paarimeetrises vees sinna lähedale saagilootuses tiirlema.
Kalade suurust on lihtsam hinnata sonarivaates
Üksikute kalakaarte järgi saab ligikaudselt hinnata ka kalade suurusi. Seda ei õpeta ükski juhend ja need hinnangud põhinevad meie pikaajalisel praktilisel püügikogemusel koos Lowrance kajaloodide kasutamisega. Lähtume alltoodud värvide kirjeldamisel Lowrance kajaloodide standardsest värvipaletist. Nagu tähelepanelikum lugeja juba mäletab, ei sõltu kala suurus „kalakaare“ pikkusest. Selle määrab ära paadi ja kala omavaheline liikumiskiirus. Küll aga on kala suuruse hindamisel oluline kalakaare joone paksus ja värv. Suuremad kalad jätavad ekraanile märksa paksema ja värvilisema „kaare“.
Kui näete ekraanil peenikesi siniseid kalakaari, siis on tegemist mõnekümnegrammiste, nn „viidikamõõtu“ kaladega. Mida rohkem on sinistes kaartes punast märgata, seda suuremad need kalad on. Kui kalakaartes domineerib punane värv, siis on tegemist mõnesajagrammiste, nö „ahvenamõõtu“ kaladega. Keskmise suurusega ahvenate parve kaared-jooned on reeglina punased. Loomulikult võivad samasuguseid kaari anda ka korraliku mõõduga särgede või nurgude parved.
Kui kalakaarte punasesse värvi hakkab ilmuma kollast tooni, siis on tegemist juba suuremate kui poolekiloste kaladega. Ka aktiivselt liikuvate ahvenaparvede hulgas võib näha selliseid kaari või jooni, kus kollast värvi näha on. Kui üksiku kalakaare põhivärv on juba kollane ja punaseid ääri on vaid veidi näha, siis on tegemist kilose või suurema kalaga (nt haug, koha). Kui selliseid kaari on korraga palju, siis on ilmselt tegemist latikaparvega. Ja jäme kollane joon või kaar annab teada mitmekilosest kalast.

Pilt 8. Eri suuruses kalad kajaloodiekraanil sonarivaates. Ülemised kaks punast kogumit 2-3m sügavusel on väikeste kalade parvekesed. Seda näitab pildi hajusus ja ümaram kuju. Allpool saadavad neid mõned ahvenamõõtu kalad. 4m sügavusel olev kollane paksem kaar võib olla suurem kala, aga kollane värvus võib tekkida ka mitme kala lähestikku asumisest, kuna seal kõrval on näha ka teisi kalakaari. All paremal põhja kohal on kindlasti tegemist juba kilo+ suuruses kalaga, võimalik et haugiga. Foto: Koit Kikas, kalaretk.ee
Latikaparvesid võib hästi häälestatud suurema ekraaniga kajaloodiga otsida ka struktuursete anduritega, kus need suhteliselt suured ja kõrge kehaga kalad siledamal põhjal selgelt eristuvate kühmude-varjudena välja joonistuvad.

Pilt 9. Suuremate kalade parved on leitavad ka Lowrance Active Imaging 3-1 või mõne teise kvaliteetse struktuuranduriga 800kHz sagedusel. Pildil paadist mööduv latikaparv Emajõel 10-15m kaugusel paadist vasakul. Tundub, et latikaparv hoiab liikuvast paadist mõne meetri eemale, sest otse paadi all pole kalu märgata. Foto: Jaak Väärsi, fishfinder.ee
Vahel võivad väiksemal kiirusel ka põhja peal asuvad kivid ja muud objektid näida sonaripildil kalakaartena. Parim viis eristamiseks on vaadata vastavat objekti kõrvuti nii sonaripildis kui Downscaniga (veel parem on Downscan koos sisse lülitatud FishRevealiga) kuna viimane suudab kalu muudest objektidest paremini eristada.
Sageli küsitakse, kas see või teine kajalood oskab kalade ja veetaimede vahel vahet teha, sest vahel võivad ka kõrgekasvulised veetaimed tunduda sonaripildis „mitmekorruseliste“ kalaparvedena. Eristamine on taas lihtne, kui vaadata lisaks sonarivaatele paralleelselt ka Strukturescani või Downscani pilti. Samuti suudavad ka portatiivsed Deeperid ja Lowrance FishHunterid veetaimi kaladest ja põhjastruktuuridest hästi eristada. Ja alati tasub mõelda kontekstile – pikad veetaimed ei kasva reeglina üksikult ja mitte eriti sügavamal kui 2-meetrises vees, kus suured kalaparved üldjuhul paadi alla väga ei kipu ja lahkuvad kiiresti.
Kokkuvõtteks
Eluaeg vaid Kodojärwel kalal käies pole ehk kajalood vältimatult vajalik, aga minnes tundmatutele vetele saab kallist kalastusaega ikka väga palju kokku hoida, püüdes sealt kus kala olemas. Olgu selleks siis ahvenaparvede otsimine veealustelt madalikelt, latikaparve asukoha väljapeilimine põhjaõngedega püügiks, koha jigimine jõesügavikest või haugi trolling sügavamates vetes. Pole ju mõtet tulutult passida asukohas, kust viimanegi kalapoeg on ammu lahkunud, ja katsetada heas usus suurt hulka erinevaid võimalusi kala mitte saada.
Hiljaaegu foorumis võrdles keegi asjatundmatu kalapüügil kajaloodi kasutamist loomaaias jahil käimisega. Väljaspool loomaaeda jahil käies kasutavad jahimehed lisaks silmadele ka näiteks optilisi sihikuid, et saakloomi paremini leida ja näha. Ja ka siis pole jahisaak garanteeritud, sest lisaks nägemisele on vaja veel mitmeid muid oskusi.
Ilma kajaloodita kalameest võiks võrrelda pimeda jahimehega, kes paugutab suvaliselt igas suunas. Vahel võib ju tõesti juhtuda, et põder jookseb täpselt õigel hetkel relvatoru eest mööda.
Meie kalapüügipraktikas on olnud ka juhtumeid, kus kajalood näitab paadi all tõelist kalasuppi, aga võtma meelitada ei õnnestugi kedagi, kuidas ka ei katsetaks. Mis innustab omakorda proovima ja eksperimenteerima. Kajaloodiga kulutab oskaja kalastaja igal juhul vähem oma aega kalade otsimisele ja sellevõrra jääb rohkem aega nende võtma meelitamiseks. Nii et arenege, kalamehed ja -naised. Ja tundke rõõmu oma saakide suurenemisest.